PENGATURAN KESEIMBANGAN ROBOT BERODA DENGAN FUZZY LOGIC
Darmawan Dwi Putra, Brian Staphen
ABSTRAK
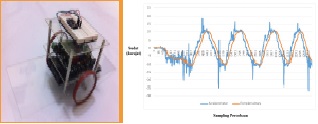
Pada penelitian ini dilakukan untuk melakukan pengaturan keseimbangan robot beroda dengan fuzzy logic. Didasarkan pada teori pendulum terbalik. Sebuah sistem kontrol yang sesuai yang dibutuhkan untuk mengontrol sistem sehingga seimbang dan stabil. Tujuan utama dari tugas akhir ini adalah dengan menggunakan strategi kontrol yang baik untuk menjaga robot dalam keadaan tegak lurus. Permasalahan yang timbul pada balancing robot adalah cara mempertahankan kondisi pada set point 0. Pada tugas akhir ini, permasalahan pada balancing robot diselesaikan dengan menerapkan algoritma pengontrol yang salah satunya kontrol fuzzy logic dengan menggunakan 7 fungsi keanggotaan. Sedangkan sensor yang digunakan adalah accelerometer dan gyroscope. Posisi setimbang pada robot beroda dua sekitar -0,65° sampai 0,65°.
Kata Kunci: Invrted Pendulum, Fuzzy Logic , Keseimbangan.
ABSTRACT
In this research, purpose to make arrangements wheeled balancing robot with fuzzy logic. Based on the theory of inverted pendulum. A control system as needed to control the system so the robot could have balanced and stable state. In this research, designed the system balance by applying fuzzy logic control on a two-wheeled robot. The problems that arise in balancing the robot is how to maintain the condition of the set point 0. In this thesis, the problem solved by applying the balancing robot control algorithms, one of which controls the use of fuzzy logic membership function 7. While the sensor is an accelerometer and a gyroscope used. Equilibrium position on the two-wheeled robot around -0.65 ° to 0.65 °.
Keywords: Invrted Pendulum, Fuzzy Logic, Balancing.
Poster :