
Hexapod Figures Out How to Walk After You Chop Its Leg Off
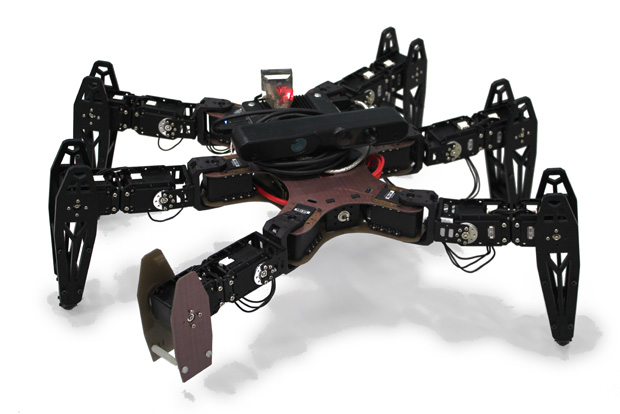
After just 20 minutes worth of iterations, in the above video example the robot has come up with a five-legged gait that moves it along at 18 cm/s, as compared to the undamaged 26 cm/s gait. Not bad, considering that an unmodified five-legged gait had it limping along at just 8 cm/s.
The cool bit about this recovery model is that it doesn’t require any specific information about what parts are malfunctioning or missing. Instead, it’s just got a known model of how it’s supposed to work, and if the actual performance that it measures is less efficient, it starts searching for new behaviors. To get all sciencey about it: “the robot will thus be able to sustain a functioning behavior when damage occurs by learning to avoid behaviors that it is unable to achieve in the real world.” [Read More]
Comments :