
Mobile Robot With Navigation Based On Embedded Linux
Khafizuddin Azazi, Rendy Andrean
ABSTRACT
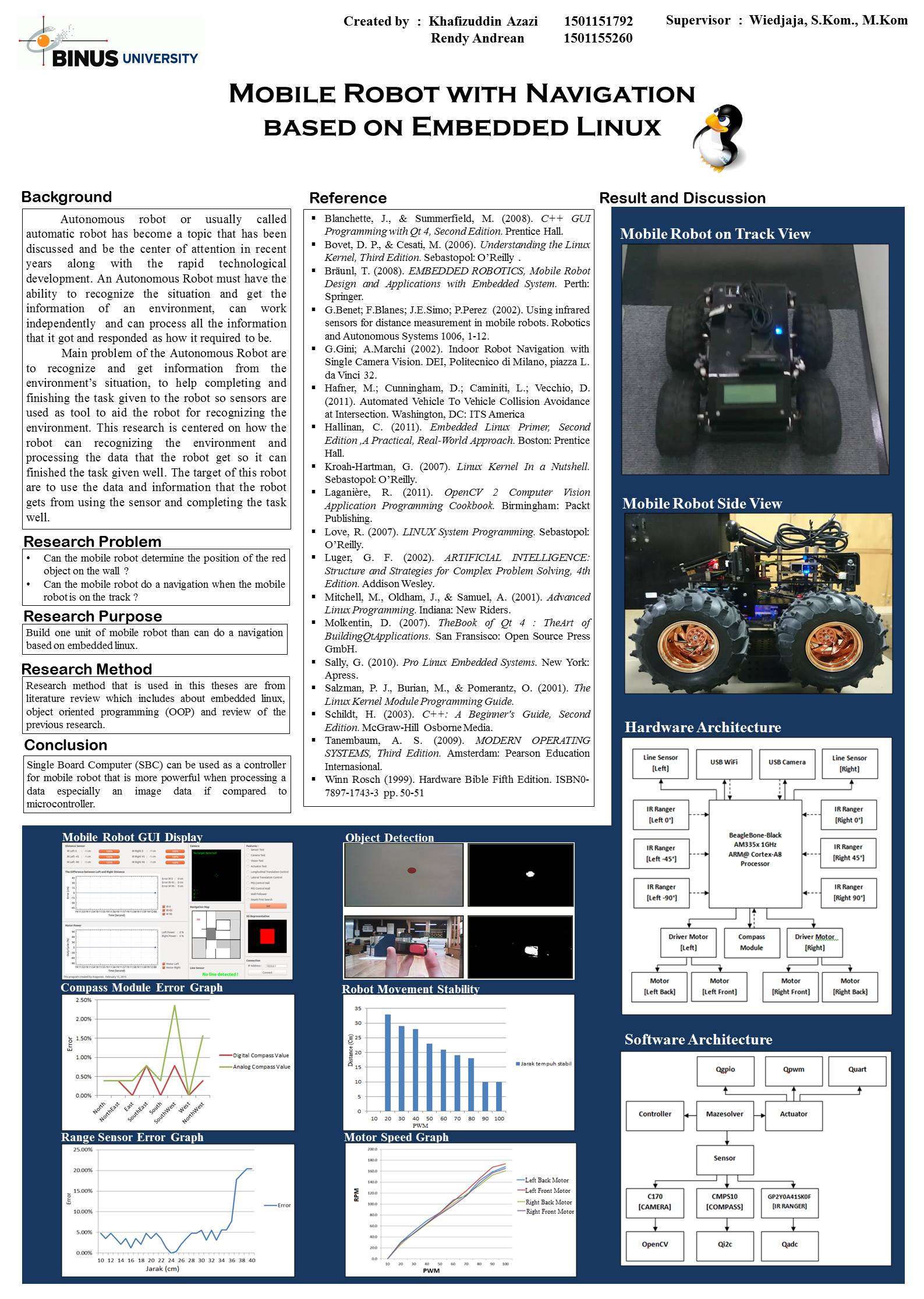
The purpose of this research are to build and design a mobile robot that use a navigation system based on embedded linux. The method of this research are by literature review method, experiment method and designing method. Analysis of the research will be done by collecting data and information from the reading of sensors that is used and compare the information that we get with the actual condition. The sensors are distance sensor IR Range, direction sensor digital compass module, camera and comparing latency of different distro linux kernel. The result that we get are like the best reading distance of the distance sensor which is the IR Ranger are±3-30 cm, digital compass module can read the value of a direction and produce the value well if there is not any material that contains magnetism that can disturb the reading of digital compass module, camera can detect object well by their color and by using the result of IR Ranger reading and digital compass module, robot can work and move independently in tracing the way and keep distance with the object. (KF & RA)
Keywords : Mobile Robot, Navigation, Embedded Linux
Berikut adalah link Video untuk penelitian ini
Poster :
Comments :