
Perancangan 3 Aksis DOF Stewart Platform Dengan Algoritma CCPM 120
Member :
- Dadit Novrianto 1701349302
- Revin Prasetia 1701302223
ABSTRACT
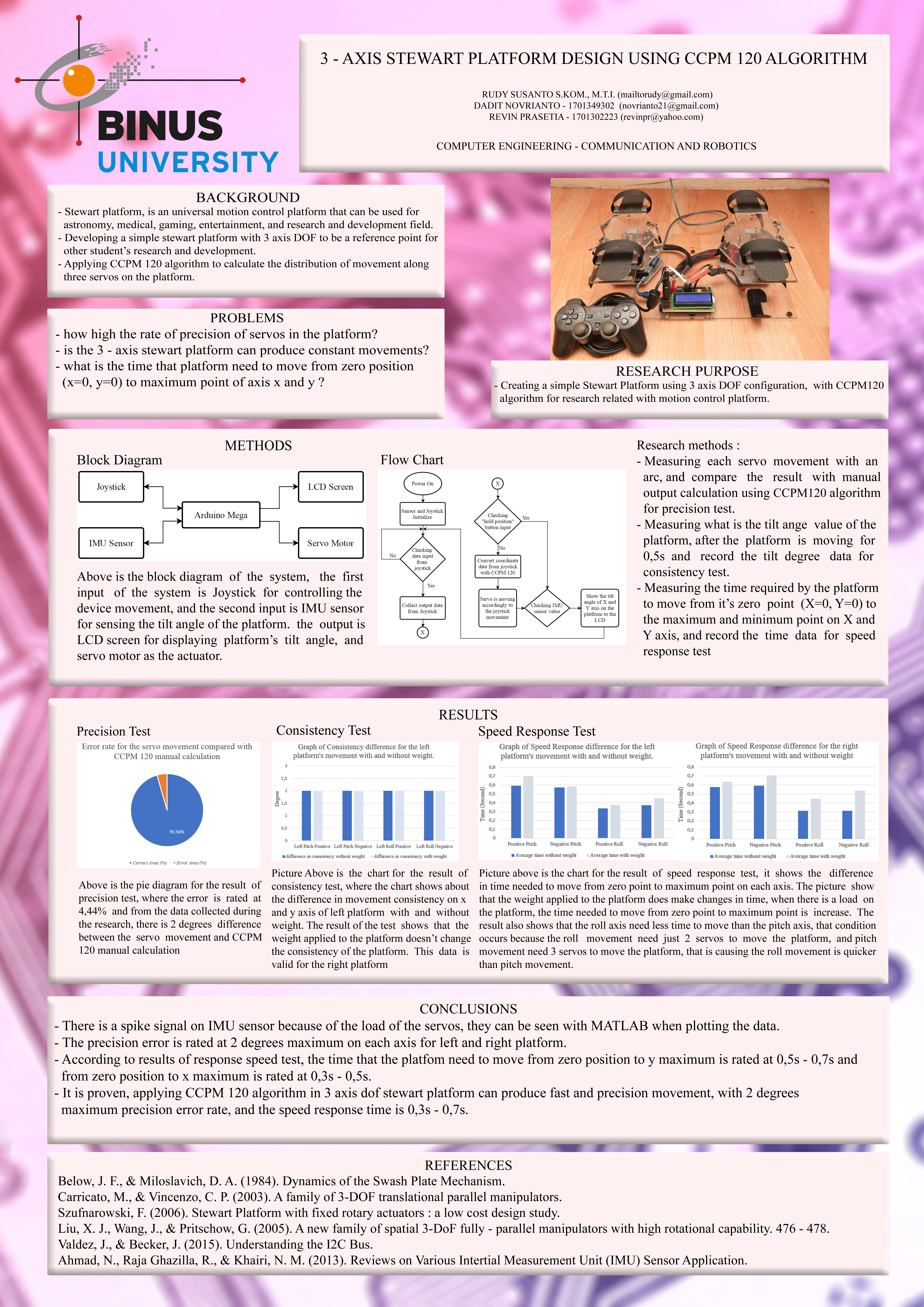
Stewart Platform is a platform consists of relation about kinematics system that has a specific mechanical characteristic, this specific mechanical characteristic will differentiate compared to other ordinary robots. This kinematics system from the stewart platform have 2 bases for the structure, one base for the foundation of the platform and one base for the base that can move the object above it. In this research, a product will be made which implement a stewart platform consist of 3 axis DOF with 3 actuators which is servo motor, CCPM 120 is an algorithm that implemented in the system, this algorithm will calculate degree distribution within actuators in a platform and IMU sensor used for detect the angle of the platform. Result of this research is a platform that has 95,56% accuration rate with 4,44% error accuration rate, precision error of the platform is 2 degrees between every iteration and speed respons is ranging from 0,5s – 0,7s for pitch movement, and 0,3s – 0,5s for roll movement. For the further research related to this thesis, flight simulator, automation in medical field, 4D cinema in motion control system can be applied for further development of this platform.
Keywords : Stewart Platform, 3 – axis DOF, Motion Control System
Berikut adalah link Video untuk penelitian ini
Comments :