
PROTOTIPE ROBOT PENGANTAR BARANG MENGGUNAKAN MOTOR STEPPER
Member :
- Gusti Ngurah Widana S.P 1301018613
- Jimmy Yunarta 1301049360
- Ardi Nugroho Chandra 1501145455
ABSTRACT
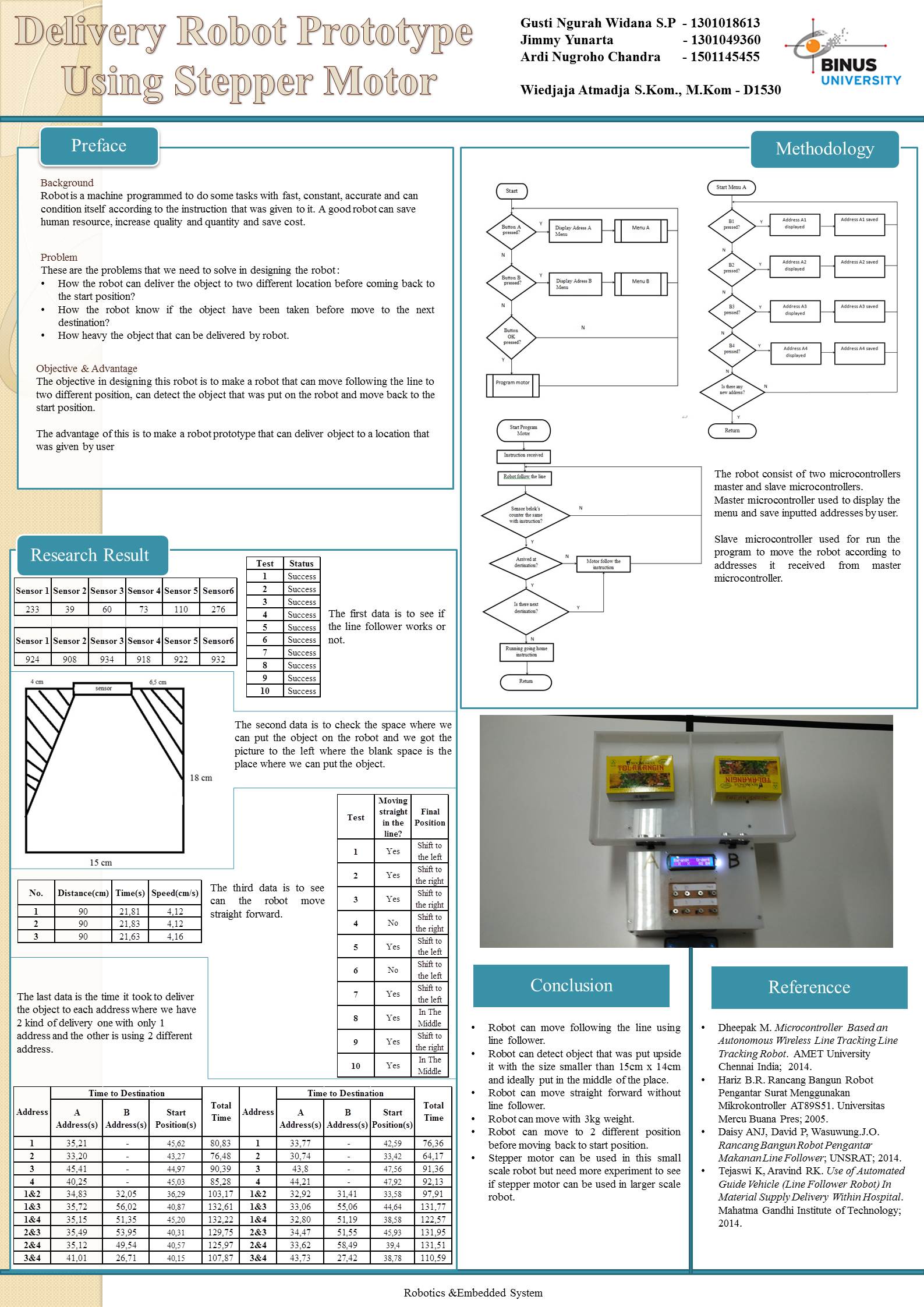
Delivery robot is designed to move following a line while carrying object to 2 different address before moving back to the start position. Robot prototype designed using 2 Arduino module that used to process the input and moving the robot. The robot has line follower sensor that used to following the line and ultrasonic sensor that used to detect the object placed on the robot. The robot tested on a 150 cm x 122 cm board that have 4 address. The time robot needed to do 1 operation differ from around 1 minutes to 2 minutes according to the objective that was set by the user.
Keyword : line follower, ultrasonic sensor , 4 address
Comments :