
APLIKASI POLA PERGERAKKAN (GAIT) HEXAPOD PADA BIDANG MIRING DAN DATAR
Arief Ambiya-1401122886, Mitsupuri Arif Pratama-1401135711, Steven Imanuel-1401139035
ABSTRAK
Aplikasi pola pergerakan (gait) robot hexapod pada bidang miring dan datar bertujuan untuk mengetahui gait yang paling optimal pada bidang datar dan miring. Gait yang digunakan adalah wave gait, ripple gait, dan tripod gait. Dari tiga gait tersebut, masing – masing gait dibagi menjadi dua, yaitu pergerakkan kaki dua cm dan pergerakkan kaki empat cm. Pergerakkan kaki yang dimaksud adalah pergerakkan end effector dari awal posisi initiate hingga menggerakkan satu cycle gerakan. Dari percobaan yang dilakukan diperoleh hasil bahwa gait yang paling optimal pada bidang datar kayu adalah gait ripple, sedangkan pada bidang datar karpet adalah gait tripod dan pada bidang miring tidak terjadi perubahan yang signifik dari segi kecepatan, hanya saja robot selalu cenderung untuk bergerak ke arah yang lebih rendah (miring). Dan dari percobaan yang dilakukan pada bidang miring diperoleh hasil bahwa gait yang paling optimal pada bidang miring kayu adalah gait tripod, begitu pula pada bidang miring karpet (AMS)
Kata kunci: Hexapod, gait, bidang miring dan datar.
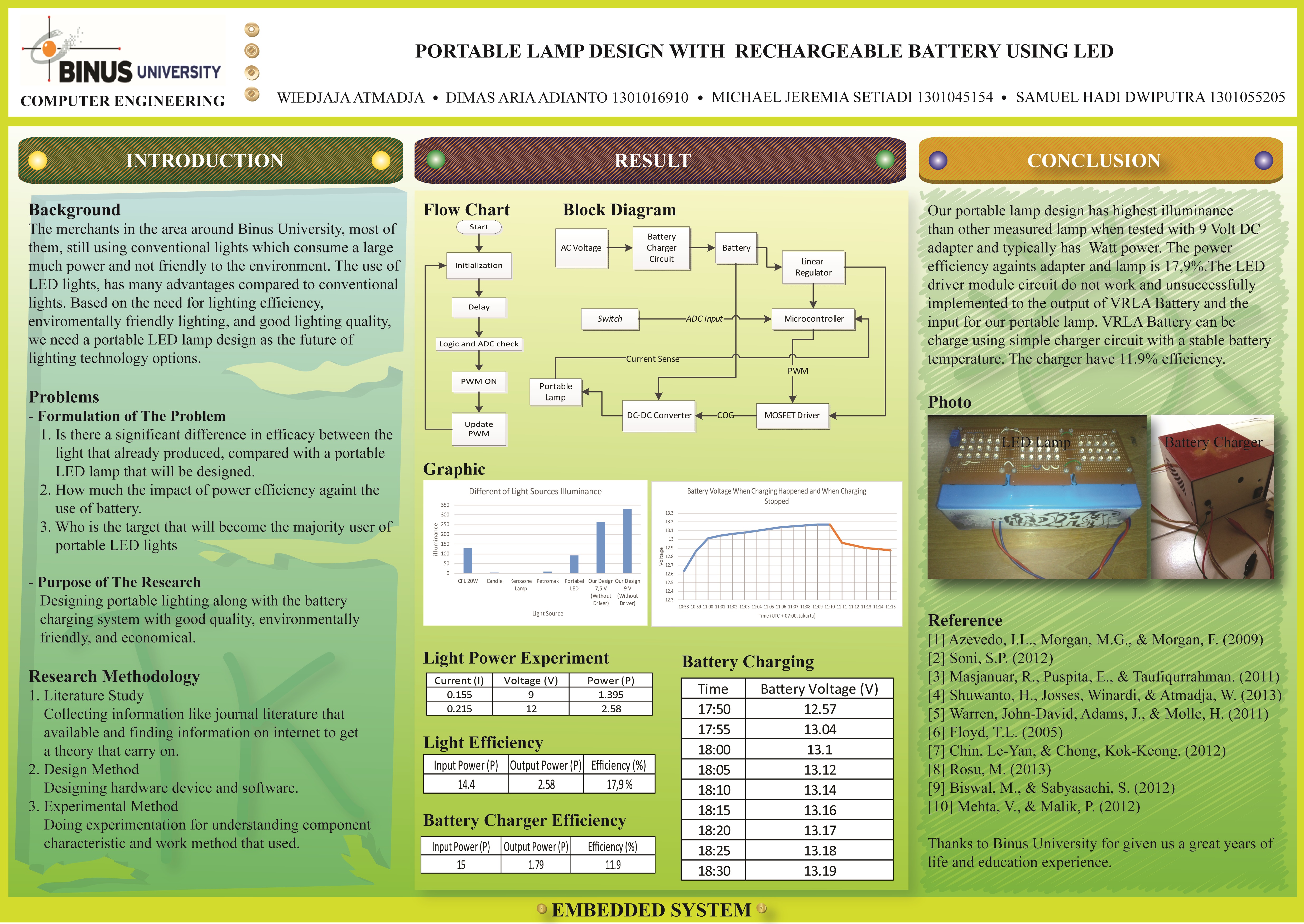
Poster :
Comments :