
Pengenalan Marka Jalan dan Estimasi Posisi Kendaraan Miniatur secara Real-Time
Penulis : Sofyan
Tahun : 2014
Sistem transportasi cerdas secara umum bertujuan untuk meningkatkan keamanan, mengurangi polusi, meningkatkan efisiensi, dan meningkatkan kenyamanan transportasi. Sistem pengenalan marka jalan merupakan salah satu teknologi yang dibutuhkan dalam sistem transportasi cerdas, dimana sistem pengenalan marka jalan dapat digunakan untuk melakukan estimasi posisi kendaraan terhadap marka jalan.
Dari sisi keamanan, informasi posisi tersebut dapat digunakan untuk memperingatkan pengendara ketika kendaraan menyimpang dari lajur yang seharusnya atau bahkan secara otomatis mengendalikan kendaraan untuk kembali ke jalur yang seharusnya. Lebih jauh lagi informasi posisi kendaraan terhadap marka jalan, bersama dengan informasi mengenai kendaraan lain di sekitarnya, dapat digunakan untuk memberikan masukan kepada pengemudi atau bahkan mengedalikan kendaraan agar mencapai formasi kendaraan di jalan raya yang lebih optimal untuk meningkatkan jumlah penumpang/kendaraan yang dapat lewat per satuan waktu.
Berbagai metode dapat digunakan untuk mengenali marka jalan berdasarkan informasi visual, antara lain dengan menggunakan Hough transform, fuzzy reasoning, gabor filter, geometrical model, color features, warp/inverse perspective mapping, maupun gabungan dari beberapa algoritma tersebut. Seringkali pemilihan algoritma yang digunakan untuk pengenalan marka jalan merupakan kompromi antara akurasi pengenalan pada berbagai kondisi jalan dan biaya komputasi. Metode dengan akurasi tinggi seringkali membutuhkan sistem komputasi yang cepat dengan biaya mahal dan konsumsi daya yang tinggi. Sebaliknya metode dengan komputasi yang ringan memiliki keterbatasan akurasi untuk kondisi jalan yang berubah-ubah.
Salah satu penelitian yang dilakukan di Universitas Bina Nusantara mengembangkan sistem pengenalan marka jalan untuk kendaraan miniatur yang beroperasi di dalam ruangan sehingga lebih mengutamakan metode dengan komputasi yang relatif ringan. Sistem pengenalan marka jalan dan estimasi posisi kendaraan terhadap marka jalan yang dikembangkan tersebut menggunakan gabungan algoritma Hough transform untuk mendeteksi garis dari gambar yang ditangkap oleh kamera, inverse perspective mapping untuk menghilangkan efek perspektif kamera, dan algoritma sederhana untuk mengenali garis marka jalan berdasarkan karakteristik garis marka jalan yang telah diketahui sebelumnya. Informasi warna dari garis marka jalan yang telah diketahui sebelumnya juga digunakan untuk mengurangi kesalahan pengenalan marka jalan.
Algoritma inverse perspective mapping digunakan untuk memproyeksikan garis-garis yang ditemukan oleh Hough transform sehingga garis marka jalan akan tampak parallel seakan-akan dilihat dari angkasa (bird’s view). Berdasarkan informasi mengenai jarak antar garis marka jalan yang sebenarnya, dengan cepat dapat ditemukan kandidat pasangan garis yang merupakan garis marka jalan. Kandidat pasangan garis marka jalan akan diverifikasi dengan warna di sekitar kedua garis tersebut sesuai dengan informasi warna garis marka jalan yang sebenarnya. Setelah pasangan garis marka jalan dikenali maka, berdasarkan posisi dan kemiringan garis tersebut, dapat dengan cepat dihitung estimasi posisi dan arah kamera/kendaraan terhadap marka jalan.
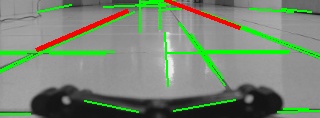
(a)
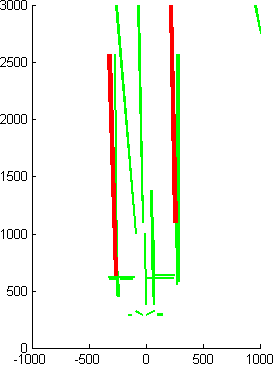
(b)
Gambar 1. Contoh hasil proses inverse perspective mapping dari hasil experimen, dimana (a) menunjukkan segmen-segmen garis yang ditemukan pada gambar dari kamera dan (b) merupakan segmen-segmen garis yang telah diproyeksikan ke sistem koordinat jalan (mm) atau bird’s view. Garis merah merupakan sepasang garis yang dikenalis sebagai garis marka jalan.
Metode yang dikembangkan tersebut diimplementasikan pada modul komputer embedded berukuran mirip dengan kartu kredit dengan nama Beaglebone. Komputer tersebut menggunakan prosesor ARM Cortex-A8 dengan kecepatan 720MHz dan sistem operasi Linux. Kamera yang digunakan merupakan kamera webcam yang dipasang secara tetap pada kendaraan dan menghadap ke depan kendaraan. Dari hasil evaluasi didapatkan kecepatan estimasi posisi kendaraan adalah 4,2 estimasi per detik. Kecepatan estimasi ini cukup untuk kendaraan miniatur yang berjalan dengan kecepatan rendah (≤ 1m/det).
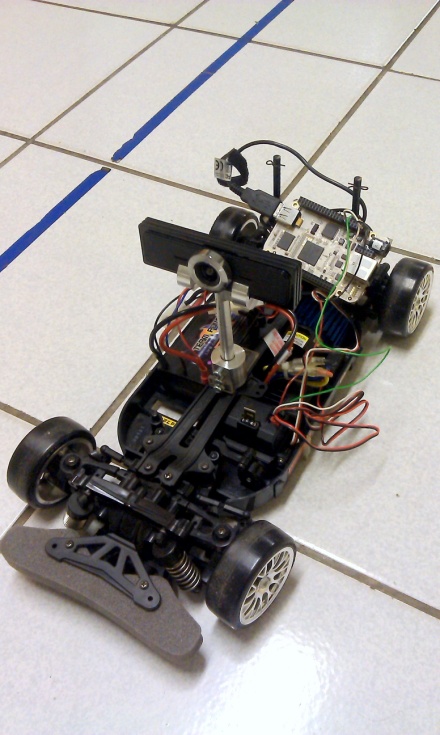 Gambar 2. Foto kendaraan miniatur, kamera webcam dan modul komputer embedded yang digunakan pada eksperimen.
Gambar 2. Foto kendaraan miniatur, kamera webcam dan modul komputer embedded yang digunakan pada eksperimen.
Sumber:
http://www.internetworkingindonesia.org/Issues/Vol5-No2-B-2013/iij_vol5_no2_b_2013_tan.pdf
Comments :